2025
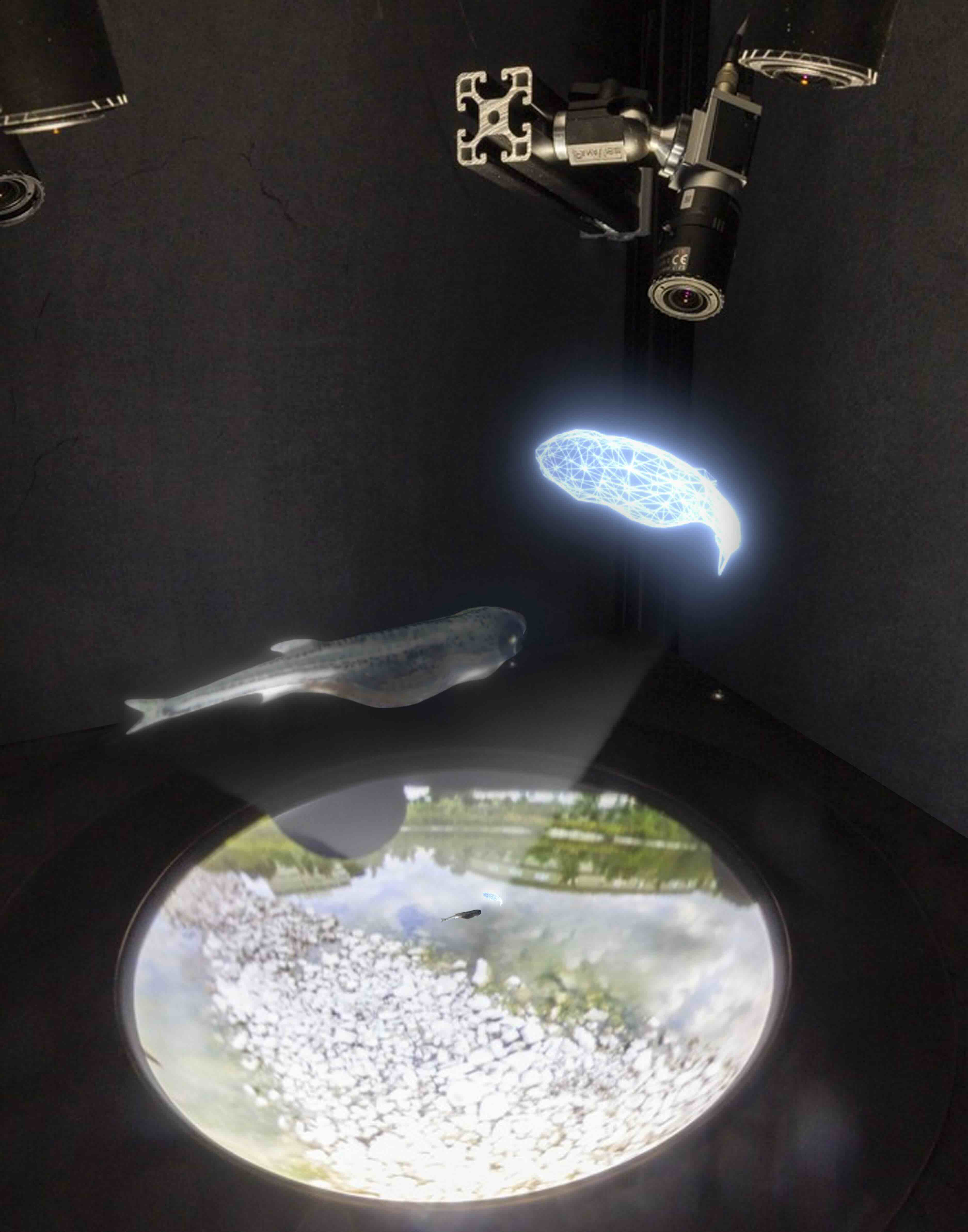
Reverse engineering the control law for schooling in zebrafish using virtual reality
Liang Li , Mate Nagy, Guy Amichay, Ruiheng Wu, Wei Wang, Oliver Deussen, Daniela Rus, Iain D Couzin. Science Robotics. DOI: 10.1126/scirobotics.adq678
Log in for PDF