
Sasha Rayshubskiy
Harvard
ICRA workshop
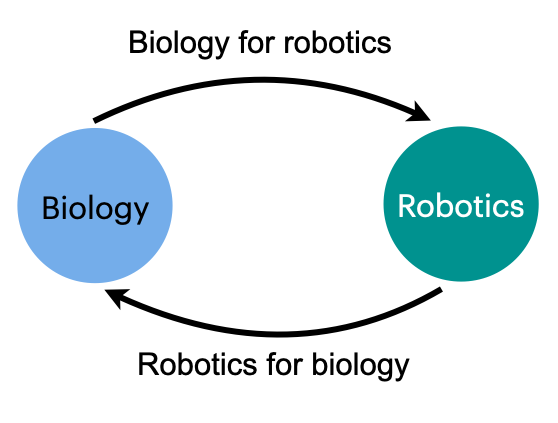
Over half a billion years of evolution, animals evolved remarkable adaptations for locomotion in complex three-dimensional environments. For centuries, engineers have turned to these biological systems to seek inspiration for constructing functional, flexible, and efficient robotics. In the past decades, biologically inspired robotics has matured into a significant branch of robotics. Recently, biologists and interdisciplinary teams are using robots as viable testbeds to explore and evaluate hypotheses in animal behavior. This strategy offers a suitable alternative to traditional biological methods, which have several limitations, including the feasibility to minimize confounding influences and isolate effects, the effects of the experiment and the experimenter on the study animal, and other limitations imposed by the behavior of the animals, etc. This workshop aims to bringing latest results in bio-inspired robots and expand their applications in biological studies from individual locomotion to collective behavior. Current studies on bio-inspired robots are evolving due to a deeper understanding of biological principles. In return, these bio-inspired robotics are providing the perfect platform for biologists to better understand biological phenomena.
Harvard

NUS

EPFL

University of Michigan

EPFL

University of Konstanz

Tsinghua University

MIT

Beihang University

Empa

Peking University

University of Bristol
Max Planck Institute of Animal Behavior

Zhejiang University

Nanjing University of Aeronautics and Astronautics
Westlake University
Stanford University
| Time | Speaker | Title | Chair |
|---|---|---|---|
| 08:20 - 08:30 | Opening | ||
| 08:30 - 09:00 | Talia Moore | A Symbiotic Philosophy for Bio-Inspired Robotics | Steven Ceron |
| 09:00 - 09:30 | Shuguang Li | Swarm Robotics Inspired by Collective Cell Migration | Steven Ceron |
| 09:30 - 10:00 | Sasha Rayshubskiy | The Fruit Fly, Drosophila Melanogaster, as a Micro-robotics Platform | Steven Ceron |
| 10:00 - 10:30 | Coffee Break (Poster Session 1) | ||
| 10:30 - 11:00 | Cecilia Laschi | From Marine Species to Soft Robotics, and Back: the Case of Soft Benthic Robots | Heiko Hamann |
| 11:00 - 11:30 | Dario Floreano | Perching Like a Hawk: What Avian-informed Drones can Tell us about Avian Flight Manoeuvres | Heiko Hamann |
| 11:30 - 12:00 | Li Wen | Octopus-inspired Sensorized Soft Arm for Environmental Interaction | Heiko Hamann |
| 12:00 - 12:10 | Xingwen Zheng | From Schooling Pufferfish in Nature to Swimming Pufferfish Robots and Back: Lateral Lines-Based Location and Orientation Perceptions Among Schooling Fish | Liang Li |
| 12:10 - 12:20 | Zhendong Dai | Biomimetic on Gecko Locomotion: from Biology to Application | Liang Li |
| 12:20 - 12:30 | Dixia Fan | Sea Guru-I, the Bio-Inspired Deep-Sea Robot From Laboratory Tests to Dives at 2000m | Liang Li |
| 12:30 - 13:30 | Lunch Break | ||
| 13:30 - 14:00 | Ardian Jusufi | Soft PaleoRobotics - Tail Fin Shape Change for Pitch Control During Swimming | Andreagiovanni Reina |
| 14:00 - 14:30 | Guangming Xie | TBD | Andreagiovanni Reina |
| 14:30 - 15:00 | Auke Ijspeert | Investigating Animal Locomotion Using Biorobots and Neuromechanical Simulations | Andreagiovanni Reina |
| 15:00 - 15:30 | Coffee Break (Poster Session 2) | ||
| 15:30 - 16:00 | Robert Katzschmann | Musculoskeletal Biohybrid Robots: From Swimmers to Legged Creatures | Wei Wang |
| 16:00 - 16:30 | Kevin Chen | Agile and Robust Micro-aerial-robot Powered by Soft Artificial Muscles | Wei Wang |
| 16:30 - 16:40 | Maya Dagher | Investigating the Coevolution of Cooperative Swimming with Robotic Fish | Jonas Kuckling |
| 16:40 - 16:50 | Nathan Lepora | Dexterous Biomimetic Tactile Robots | Jonas Kuckling |
| 16:50 - 17:00 | Tony G. Chen | TadBot: A Tadpole-Mimic Robot for Studying Poison Frog Parental Investment | Jonas Kuckling |
| 17:00 - 17:20 | Closing & Award |
MPI-AB & University of Konstanz
University of Wisconsin-Madison

Massachusetts Institute of Technology

Massachusetts Institute of Technology

University of Konstanz

University of Konstanz

MPI-AB

University of Konstanz

